“嵌入式开发”的版本间的差异
来自Ubuntu中文
(→常用嵌入式核心板的对比=) |
|||
| 第1行: | 第1行: | ||
| − | = | + | = 基于NXP IMX6ULL芯片的开发板 = |
| − | + | ==百问网100ask IMX6ULL开发板 == | |
| − | = | + | ==== 在windows +虚拟机环境下开发(参考《第四 A 章 使用 USB 网卡直连配置网络》) ==== |
| − | + | ||
| − | + | ||
| + | //启动方式如下: [[File:vertopal_d4a9bdf9044e4bffbe844f8299b82f2d/5de0c48088dd28e2a943b947f86f3f2039e5847f.png|image]] | ||
| − | + | 注意:这个拨码仅仅是uboot的启动,而uboot有可能启动的是sd卡(mmc=0),也考虑启动的是emmc(mmc=1),可以在uboot的环境变量中配置: | |
| − | = | + | <pre> |
| − | == | + | => printenv |
| − | === | + | baudrate=115200 |
| − | + | board_name=EVK | |
| + | board_rev=14X14 | ||
| + | boot_fdt=try | ||
| + | ...... | ||
| + | ...... | ||
| + | mmcboot=echo Booting from mmc ...; run mmcargs; if test ${tee} = yes; then run loadfdt; run loadtee; bootm ${tee_addr} - ${fdt_addr}; else if test ${boot_fdt} = yes || test ${boot_fdt} = try; then if run loadfdt; then bootz ${loadaddr} - ${fdt_addr}; else if test ${boot_fdt} = try; then bootz; else echo WARN: Cannot load the DT; fi; fi; else bootz; fi; fi; | ||
| + | mmcdev=1 //原始是mmc=1即emmc启动 | ||
| + | mmcpart=2 | ||
| + | mmcroot=/dev/mmcblk1p2 rootwait rw //原始是mmc=1即emmc启动 | ||
| + | netargs=setenv bootargs console=${console},${baudrate} root=/dev/nfs ip=dhcp nfsroot=${serverip}:${nfsroot},v3,tcp | ||
| + | ...... | ||
| + | ...... | ||
| − | === | + | Environment size: 2738/8188 bytes |
| − | + | => setenv mmcdev 0 //改为mmc=0即sd卡启动 | |
| + | => setenv mmcroot/dev/mmcblk0p2 rootwait rw //改为mmc=0即sd卡启动 | ||
| + | => saveenv | ||
| + | Saving Environment to MMC... | ||
| + | Writing to MMC(0)... done | ||
| + | =></pre> | ||
| + | 从开机log可以看到到底是mmc=0即sd卡启动: | ||
| − | + | <pre>U-Boot 2017.03 (Oct 29 2022 - 21:06:24 -0400) | |
| − | + | CPU: Freescale i.MX6ULL rev1.1 696 MHz (running at 396 MHz) | |
| + | CPU: Industrial temperature grade (-40C to 105C) at 39C | ||
| + | Reset cause: POR | ||
| + | Model: Freescale i.MX6 ULL 14x14 EVK Board | ||
| + | Board: MX6ULL 14x14 EVK | ||
| + | DRAM: 512 MiB | ||
| + | MMC: FSL_SDHC: 0, FSL_SDHC: 1 | ||
| + | Display: TFT7016 (1024x600) | ||
| + | Video: 1024x600x24 | ||
| + | In: serial | ||
| + | Out: serial | ||
| + | Err: serial | ||
| + | Net: No ethernet found. | ||
| + | Normal Boot | ||
| + | Hit any key to stop autoboot: 0 | ||
| + | ## Error: "findtee" not defined | ||
| + | switch to partitions #0, OK | ||
| + | mmc0 is current device <<<<<<< | ||
| + | switch to partitions #0, OK | ||
| + | mmc0 is current device <<<<<<< | ||
| + | </pre> | ||
| + | 还是mmc=1即emmc启动: | ||
| − | + | <pre>U-Boot 2017.03 (Oct 29 2022 - 21:06:24 -0400) | |
| − | + | CPU: Freescale i.MX6ULL rev1.1 696 MHz (running at 396 MHz) | |
| + | CPU: Industrial temperature grade (-40C to 105C) at 42C | ||
| + | Reset cause: POR | ||
| + | Model: Freescale i.MX6 ULL 14x14 EVK Board | ||
| + | Board: MX6ULL 14x14 EVK | ||
| + | DRAM: 512 MiB | ||
| + | MMC: FSL_SDHC: 0, FSL_SDHC: 1 | ||
| + | Display: TFT7016 (1024x600) | ||
| + | Video: 1024x600x24 | ||
| + | In: serial | ||
| + | Out: serial | ||
| + | Err: serial | ||
| + | Net: No ethernet found. | ||
| + | Normal Boot | ||
| + | Hit any key to stop autoboot: 0 | ||
| + | ## Error: "findtee" not defined | ||
| + | switch to partitions #0, OK | ||
| + | mmc1(part 0) is current device <<<<<<< | ||
| + | switch to partitions #0, OK | ||
| + | mmc1(part 0) is current device <<<<<<< | ||
| + | </pre> | ||
| + | //调试环境如下: [[File:vertopal_d4a9bdf9044e4bffbe844f8299b82f2d/0e162767e613040b5356a8442a70011a041716d8.png|image]] | ||
| − | + | 虚拟机的配置类似如下: [[File:vertopal_d4a9bdf9044e4bffbe844f8299b82f2d/b589a98b40c7bce7fd7f389403a7327f36360011.png|image]] | |
| − | + | vscode使用ssh remote插件远程登陆vmware的代码: | |
| − | + | <img src="https://img2022.cnblogs.com/blog/1974711/202210/1974711-20221009232455525-267471114.png" width="40%"> | |
| − | + | 效果图: | |
| − | + | <img src="https://img2022.cnblogs.com/blog/1974711/202210/1974711-20221009232532859-1841111653.png" width="40%"> | |
| − | + | //开发板配置: ifconfig eth0 192.168.5.9 为了避免每次开机配置,可以: 设置 IP 为固定静态 IP(开机不变) 设置 eth0 为静态 IP 地址, 开发板/etc/network/目录下对 interfaces 文件进行修改 。 <code>[root@100ask:~]# vi /etc/network/interfaces</code> 修改并为如下内容,执行 :wq 保存并退出,执行/etc/init.d/S40network restart 重启网络服务。 | |
| − | + | <pre>auto lo | |
| + | iface lo inet loopback | ||
| + | auto eth0 | ||
| + | iface eth0 inet static | ||
| + | address 192.168.5.9 | ||
| + | netmask 255.255.255.0 | ||
| + | gateway 192.168.5.1</pre> | ||
| + | 《4.4.1 文件系统内使用 nfs 挂载 ubuntu 目录》 | ||
| − | + | <pre>[root@100ask:~]# mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt</pre> | |
| + | <span id="在windows-虚拟机环境下开发参考第四-b-章-使用路由器配置网络"></span> | ||
| + | ==== 在windows +虚拟机环境下开发(参考《第四 B 章 使用路由器配置网络》) ==== | ||
| − | + | 1.windows PC的wifi和路由器连接,比如获得IP是192.168.3.240.虚拟机使用“桥接模式-直接连接物理网络”,比如获得IP是192.168.3.10 2.开发板启动wifi,可以直接执行如下start_wifi.sh的shell脚本: | |
| − | + | <pre>#!/bin/bash | |
| + | #启用 wlan0 无线网络设备 | ||
| + | ifconfig wlan0 up | ||
| + | #扫描周围网络设备 | ||
| + | #iw dev wlan0 scan |grep SSID | ||
| + | #配置网络连接参数 | ||
| + | rm -rf /etc/wpa_supplicant.conf | ||
| + | wpa_passphrase weiba1985 19560206 >> /etc/wpa_supplicant.conf | ||
| + | #连接 wifi 设备 | ||
| + | wpa_supplicant -B -iwlan0 -c /etc/wpa_supplicant.conf | ||
| + | #查看连接状态 | ||
| + | iw wlan0 link | ||
| + | #为 wlan0 获取 ip 地址,确认与PC可以相互ping通 | ||
| + | udhcpc -i wlan0 | ||
| + | #查看所有网络设备 | ||
| + | ifconfig -a</pre> | ||
| + | 比如获得路由器分配的IP是192.168.3.6 3.用mobaxterm可以分别ssh连接到虚拟机和开发板的终端,在开发板的终端把虚拟机的文件系统加入mnt: <code>mount -t nfs -o nolock,vers=3 192.168.3.10:/home/book/nfs_rootfs /mnt</code> | ||
| − | + | == 代码编译 == | |
| − | + | === 代码下载 === | |
| − | + | 执行以下4条命令,为方便大家复制,第3条是很长的命令,使用了,需要一并拷贝: | |
| − | + | <pre>book@100ask:~ git clone https://e.coding.net/codebug8/repo.git | |
| + | book@100ask:~$ mkdir -p 100ask_imx6ull-sdk && cd 100ask_imx6ull-sdk | ||
| + | book@100ask:~/100ask_imx6ull-sdk$ ../repo/repo init -u \ | ||
| + | https://gitee.com/weidongshan/manifests.git -b \ | ||
| + | linux-sdk -m imx6ull/100ask_imx6ull_linux4.9.88_release.xml --no-repo-verify | ||
| + | book@100ask:~/100ask_imx6ull-sdk$ ../repo/repo sync -j4</pre> | ||
| + | 在 ~/.bashrc 的行尾添加如下: | ||
| − | + | <pre>export ARCH=arm | |
| + | export CROSS_COMPILE=arm-buildroot-linux-gnueabihf- | ||
| + | export PATH=$PATH:/home/book/100ask_imx6ull-sdk/ToolChain/arm-buildroot-linux-gnueabihf_sdk-buildroot/bin</pre> | ||
| + | 设置完毕后,要执行 source ~/.bashrc 命令使其生效, | ||
| − | + | === 应用程序的编译和执行 === | |
| − | + | 我们要想给 ARM 板编译出 hello 程序,需要使用交叉编译工具链,比如: | |
| − | + | <pre>$ arm-buildroot-linux-gnueabihf-gcc -o hello hello.c</pre> | |
| + | 这样编译出来的 hello 程序才可以在 ARM 板子上运行。 先把编译生成的 hello 文件拷贝到 Ubuntu nfs 服务目录下,备用: | ||
| − | + | <pre>$ cp hello /home/book/nfs_rootfs</pre> | |
| + | <span id="调试开发板方法1使用nfs方式"></span> | ||
| + | === 调试开发板方法1:使用nfs方式 === | ||
| − | + | 这种方式一般不自己从头开始编译busybox,只用于调试uboot+linux kernel+dts,文件系统即busybox不需要调整的场景。 #### uboot | |
| − | + | <pre>u-boot的编译过程如下(编译uboot前必须先配置好工具链等开发环境): | |
| + | book@100ask: ~/100ask_imx6ull-sdk$ cd Uboot-2017.03 | ||
| + | book@100ask: ~/100ask_imx6ull-sdk/Uboot-2017.03$ make distclean | ||
| + | book@100ask: ~/100ask_imx6ull-sdk/Uboot-2017.03$ make mx6ull_14x14_evk_defconfig | ||
| + | book@100ask: ~/100ask_imx6ull-sdk/Uboot-2017.03$ make</pre> | ||
| + | 编译后检查是否生效,需要看看开机时间戳是否改变了,如下: | ||
| − | + | <pre>U-Boot 2017.03 (Oct 29 2022 - 21:06:24 -0400)</pre> | |
| + | <span id="linux内核dts"></span> | ||
| + | ==== LINUX内核+dts ==== | ||
| − | + | 为了防止编译没有生效,除了留意打印的编译时间戳,还可以修改一些标记处,烧入单板时检查标记是否生效了,比如kernel顶层Makefile的: | |
| − | + | <pre>VERSION = 4 | |
| + | PATCHLEVEL = 9 | ||
| + | SUBLEVEL = 88 | ||
| + | EXTRAVERSION = 20221029_by_nishengyue <------ 增加标记</pre> | ||
| + | 烧入单板后应该有类似的打印,说明编译真正生效了: | ||
| − | + | <pre>[ 0.000000] Booting Linux on physical CPU 0x0 | |
| − | + | [ 0.000000] Linux version 4.9.8820221029_by_nishengyue (book@100ask) (gcc version 7.5.0 (Buildroot 2020.02-gee85cab) ) #1 SMP PREEMPT Sun Oct 30 11:46:38 CST 2022</pre> | |
| + | 在 <code>~/100ask_imx6ull-sdk/Linux-4.9.88</code> 路径下,kernel的编译过程如下(编译内核前需要先配置好工具链等一些环境变量): | ||
| − | = | + | <pre>make mrproper |
| − | + | make 100ask_imx6ull_defconfig | |
| − | + | make zImage -j4 | |
| + | make dtbs V=1 | ||
| + | cp arch/arm/boot/zImage ~/nfs_rootfs | ||
| + | cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs</pre> | ||
| + | 如果出现 multiple definition of `yylloc` 报错,请参考该链接解决:https://blog.csdn.net/qq_36393978/article/details/117695708 | ||
| − | + | 这样在nfs_rootfs 能看到zImage和100ask_imx6ull-14x14.dtb 文件。 | |
| − | = | + | <span id="编译内核module"></span> |
| + | ==== 编译内核MODULE ==== | ||
| − | + | <pre>book@b ook-virtual-machine:~$ cd ~/100ask_imx6ull-sdk/Linux-4.9.88/ | |
| − | + | book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make ARCH=arm CROSS_COMPILE=arm-buildroot-linux- | |
| − | + | gnueabihf- modules</pre> | |
| − | + | 安装内核module执行以下命令: | |
| − | + | <pre>book@book-virtual-machine:~$ cd ~/100ask_imx6ull-sdk/Linux-4.9.88/ | |
| + | book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ sudo make ARCH=arm INSTALL_MOD_PATH=/home/book/nfs_rootfs/ modules_install</pre> | ||
| + | 这样在 nfs_rootfs 能看到 lib 文件夹。 | ||
| − | + | <span id="安装编译的内核设备树module"></span> | |
| + | ==== 安装编译的内核+设备树+module ==== | ||
| − | + | 执行命令拷贝: | |
| − | + | <pre>cp /mnt/zImage /boot | |
| − | ==== | + | cp /mnt/*.dtb /boot |
| − | + | cp /mnt/lib/modules /lib -rfd</pre> | |
| + | ==== uboot从nfs网络启动 ==== | ||
| − | + | 1.编译的结果拷贝到nfs目录下: | |
| − | + | ||
| − | + | <pre>book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cp zImage ~/nfs_rootfs/ | |
| − | + | book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cp 100ask_imx6ull-14x14.dtb ~/nfs_rootfs/ | |
| − | + | book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cp -rf rootfs.tar.bz2 ~/nfs_rootfs/ | |
| + | book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cd ~/nfs_rootfs | ||
| + | book@100ask:~/nfs_rootfs$ sudo tar xjf rootfs.tar.bz2</pre> | ||
| + | 2.ubuntu开启tftp: 在 Ubuntu 中执行以下命令安装 TFTP 服务: | ||
| − | + | <pre>sudo apt-get install tftp-hpa tftpd-hpa </pre> | |
| − | + | 然后,创建 TFTP 服务器工作目录,并打开 TFTP 服务配置文件,如下: | |
| − | + | ||
| − | + | ||
| − | + | <pre>sudo vim /etc/default/tftpd-hpa </pre> | |
| − | + | 在配置文件/etc/default/tftpd-hpa 中,添加以下字段: | |
| − | + | ||
| − | + | ||
| − | + | ||
| + | <pre>TFTP_DIRECTORY="/home/book/nfs_rootfs" | ||
| + | TFTP_OPTIONS="-l -c -s" </pre> | ||
| + | 最后,重启 TFTP 服务: | ||
| + | <pre>sudo service tftpd-hpa restart </pre> | ||
| + | 查看 tftp 服务是否在运行,运行如下命令,即可查看是否在后台运行。 | ||
| − | + | <pre>ps -aux | grep "tftp"</pre> | |
| − | + | 3.ubooot阶段启动停住后,输入如下: | |
| − | + | <pre>=> setenv serverip 192.168.5.11 //设置服务器的 IP 地址,这里指的是 Ubuntu 主机 IP | |
| + | => setenv ipaddr 192.168.5.9 //设置开发板的 IP 地址。 | ||
| + | => ping 192.168.5.11 //检查是否能ping通 | ||
| + | => setenv nfsroot /home/book/nfs_rootfs //设置 nfs 文件系统所在目录。 | ||
| + | => run netboot //设置完成后,运行网络启动系统命令 </pre> | ||
| + | <span id="调试开发板方法2使用编译buildroot套件并烧录进单板"></span> | ||
| + | === 调试开发板方法2:使用编译buildroot套件并烧录进单板 === | ||
| − | + | 这种方式一般可以一次性编译uboot+linux kernel+dts+文件系统busybox,操作简单长,但是如果全编译时间长。 | |
| + | ==== buildroot套件的全编译 ==== | ||
| − | + | 下面以100ask_imx6ull_pro_ddr512m_systemV_qt5_defconfig配置文件为例,在ubuntu终端上说明 Buildroot 的配置过程,在 <code>~/100ask_imx6ull-sdk/Buildroot_2020.02.x</code> 路径下: | |
| − | + | ||
| − | + | <pre>make clean | |
| + | make 100ask_imx6ull_pro_ddr512m_systemV_qt5_defconfig | ||
| + | make all</pre> | ||
| + | 注:其中buildroot支持的配置如下: | ||
| − | + | <pre>book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make list-defconfigs | |
| − | + | Built-in configs: | |
| − | + | 100ask_imx6ull_mini_ddr512m_systemV_core_defconfig - Build for 100ask_imx6ull_mini_ddr512m_systemV_core | |
| − | == | + | 100ask_imx6ull_mini_ddr512m_systemV_qt5_defconfig - Build for 100ask_imx6ull_mini_ddr512m_systemV_qt5 |
| − | + | 100ask_imx6ull_pro_ddr512m_systemV_core_defconfig - Build for 100ask_imx6ull_pro_ddr512m_systemV_core | |
| − | == | + | 100ask_imx6ull_pro_ddr512m_systemV_qt5_defconfig - Build for 100ask_imx6ull_pro_ddr512m_systemV_qt5 |
| − | + | 100ask_stm32mp157_pro_ddr512m_busybox_core_defconfig - Build for 100ask_stm32mp157_pro_ddr512m_busybox_core | |
| + | .... | ||
| + | qemu_aarch64_virt_defconfig - Build for qemu_aarch64_virt | ||
| + | qemu_arm_versatile_defconfig - Build for qemu_arm_versatile | ||
| + | qemu_arm_versatile_nommu_defconfig - Build for qemu_arm_versatile_nommu | ||
| + | qemu_arm_vexpress_defconfig - Build for qemu_arm_vexpress | ||
| + | qemu_arm_vexpress_tz_defconfig - Build for qemu_arm_vexpress_tz | ||
| + | ...... | ||
| + | raspberrypi0_defconfig - Build for raspberrypi0 | ||
| + | raspberrypi0w_defconfig - Build for raspberrypi0w | ||
| + | raspberrypi2_defconfig - Build for raspberrypi2 | ||
| + | raspberrypi3_64_defconfig - Build for raspberrypi3_64 | ||
| + | raspberrypi3_defconfig - Build for raspberrypi3 | ||
| + | raspberrypi3_qt5we_defconfig - Build for raspberrypi3_qt5we | ||
| + | raspberrypi4_64_defconfig - Build for raspberrypi4_64 | ||
| + | raspberrypi4_defconfig - Build for raspberrypi4 | ||
| + | raspberrypi_defconfig - Build for raspberrypi | ||
| + | .......</pre> | ||
| + | <span id="在-buildroot-下进入-menuconfig-包选择配置配置界面"></span> | ||
| + | ==== 在 buildroot 下进入 menuconfig 包选择配置配置界面 ==== | ||
| − | = | + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make menuconfig</pre> |
| − | == | + | <span id="buildroot-下单独编译-u-boot"></span> |
| − | === | + | ==== buildroot 下单独编译 u-boot ==== |
| − | + | ||
| − | + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make uboot-rebuild </pre> | |
| − | === | + | <span id="buildroot-下单独编译内核dts"></span> |
| − | + | ==== buildroot 下单独编译内核+dts ==== | |
| + | |||
| + | 在 <code>book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/dl/linux/git</code> 路径下 | ||
| + | |||
| + | <pre>find . -iname *.o|xargs rm -rf *.o | ||
| + | make mrproper | ||
| + | make 100ask_imx6ull_defconfig | ||
| + | make zImage -j4 | ||
| + | make dtbs | ||
| + | cp arch/arm/boot/zImage /home/book/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images/ | ||
| + | cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb /home/book/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images/</pre> | ||
| + | //nisy:这个zImage是真正重编译的,但是buildroot的sdcard.img 的kernel没有重新编译,如何解决? | ||
| + | |||
| + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make linux-rebuild //存疑,似乎仅仅是重新打包了zImage</pre> | ||
| + | <span id="buildroot-下进入内核-make-menuconfig-配置选项界面"></span> | ||
| + | ==== buildroot 下进入内核 make menuconfig 配置选项界面 ==== | ||
| + | |||
| + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make linux-menuconfig </pre> | ||
| + | <span id="buildroot-下单独编译某个软件包"></span> | ||
| + | ==== buildroot 下单独编译某个软件包 ==== | ||
| + | |||
| + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make <pkg>-rebuild </pre> | ||
| + | <span id="buildroot-下进入-busybox-配置界面"></span> | ||
| + | ==== buildroot 下进入 busybox 配置界面 ==== | ||
| + | |||
| + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make busybox-menuconfig </pre> | ||
| + | buildroot 下生成系统 sdk,最后生成的目录在 output/images/目录下 | ||
| + | |||
| + | <pre>book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make sdk </pre> | ||
| + | <span id="buildroot-下检查文件系统是否真正重编译"></span> | ||
| + | ==== buildroot 下检查文件系统是否真正重编译 ==== | ||
| + | |||
| + | 可以在这个文件中做标记: | ||
| + | |||
| + | <pre>vi /home/book/100ask_imx6ull-sdk/Buildroot_2020.02.x/board/100ask/nxp-imx6ull/rootfs-overlay/systemV/etc/issue </pre> | ||
| + | 烧入单板后,检查登陆后,是否有自己标记的字符串。 | ||
2023年6月18日 (日) 17:01的版本
目录
基于NXP IMX6ULL芯片的开发板
百问网100ask IMX6ULL开发板
在windows +虚拟机环境下开发(参考《第四 A 章 使用 USB 网卡直连配置网络》)
//启动方式如下: image
{kind=link}
注意:这个拨码仅仅是uboot的启动,而uboot有可能启动的是sd卡(mmc=0),也考虑启动的是emmc(mmc=1),可以在uboot的环境变量中配置:
=> printenv
baudrate=115200
board_name=EVK
board_rev=14X14
boot_fdt=try
......
......
mmcboot=echo Booting from mmc ...; run mmcargs; if test ${tee} = yes; then run loadfdt; run loadtee; bootm ${tee_addr} - ${fdt_addr}; else if test ${boot_fdt} = yes || test ${boot_fdt} = try; then if run loadfdt; then bootz ${loadaddr} - ${fdt_addr}; else if test ${boot_fdt} = try; then bootz; else echo WARN: Cannot load the DT; fi; fi; else bootz; fi; fi;
mmcdev=1 //原始是mmc=1即emmc启动
mmcpart=2
mmcroot=/dev/mmcblk1p2 rootwait rw //原始是mmc=1即emmc启动
netargs=setenv bootargs console=${console},${baudrate} root=/dev/nfs ip=dhcp nfsroot=${serverip}:${nfsroot},v3,tcp
......
......
Environment size: 2738/8188 bytes
=> setenv mmcdev 0 //改为mmc=0即sd卡启动
=> setenv mmcroot/dev/mmcblk0p2 rootwait rw //改为mmc=0即sd卡启动
=> saveenv
Saving Environment to MMC...
Writing to MMC(0)... done
=>
从开机log可以看到到底是mmc=0即sd卡启动:
U-Boot 2017.03 (Oct 29 2022 - 21:06:24 -0400) CPU: Freescale i.MX6ULL rev1.1 696 MHz (running at 396 MHz) CPU: Industrial temperature grade (-40C to 105C) at 39C Reset cause: POR Model: Freescale i.MX6 ULL 14x14 EVK Board Board: MX6ULL 14x14 EVK DRAM: 512 MiB MMC: FSL_SDHC: 0, FSL_SDHC: 1 Display: TFT7016 (1024x600) Video: 1024x600x24 In: serial Out: serial Err: serial Net: No ethernet found. Normal Boot Hit any key to stop autoboot: 0 ## Error: "findtee" not defined switch to partitions #0, OK mmc0 is current device <<<<<<< switch to partitions #0, OK mmc0 is current device <<<<<<<
还是mmc=1即emmc启动:
U-Boot 2017.03 (Oct 29 2022 - 21:06:24 -0400) CPU: Freescale i.MX6ULL rev1.1 696 MHz (running at 396 MHz) CPU: Industrial temperature grade (-40C to 105C) at 42C Reset cause: POR Model: Freescale i.MX6 ULL 14x14 EVK Board Board: MX6ULL 14x14 EVK DRAM: 512 MiB MMC: FSL_SDHC: 0, FSL_SDHC: 1 Display: TFT7016 (1024x600) Video: 1024x600x24 In: serial Out: serial Err: serial Net: No ethernet found. Normal Boot Hit any key to stop autoboot: 0 ## Error: "findtee" not defined switch to partitions #0, OK mmc1(part 0) is current device <<<<<<< switch to partitions #0, OK mmc1(part 0) is current device <<<<<<<
//调试环境如下: image
{kind=link}
虚拟机的配置类似如下: image
{kind=link}
vscode使用ssh remote插件远程登陆vmware的代码:
<img src="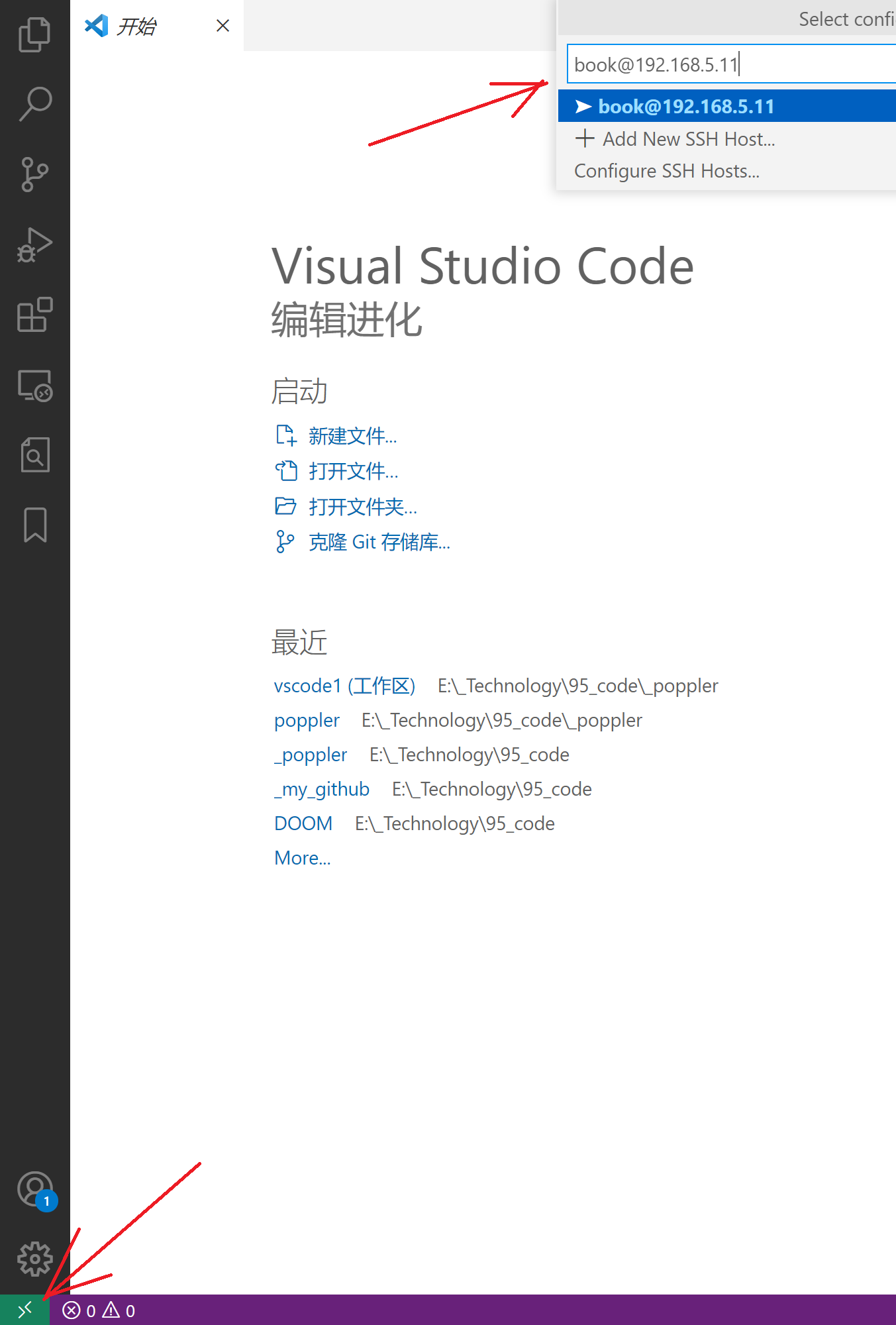 " width="40%">
" width="40%">
效果图:
<img src="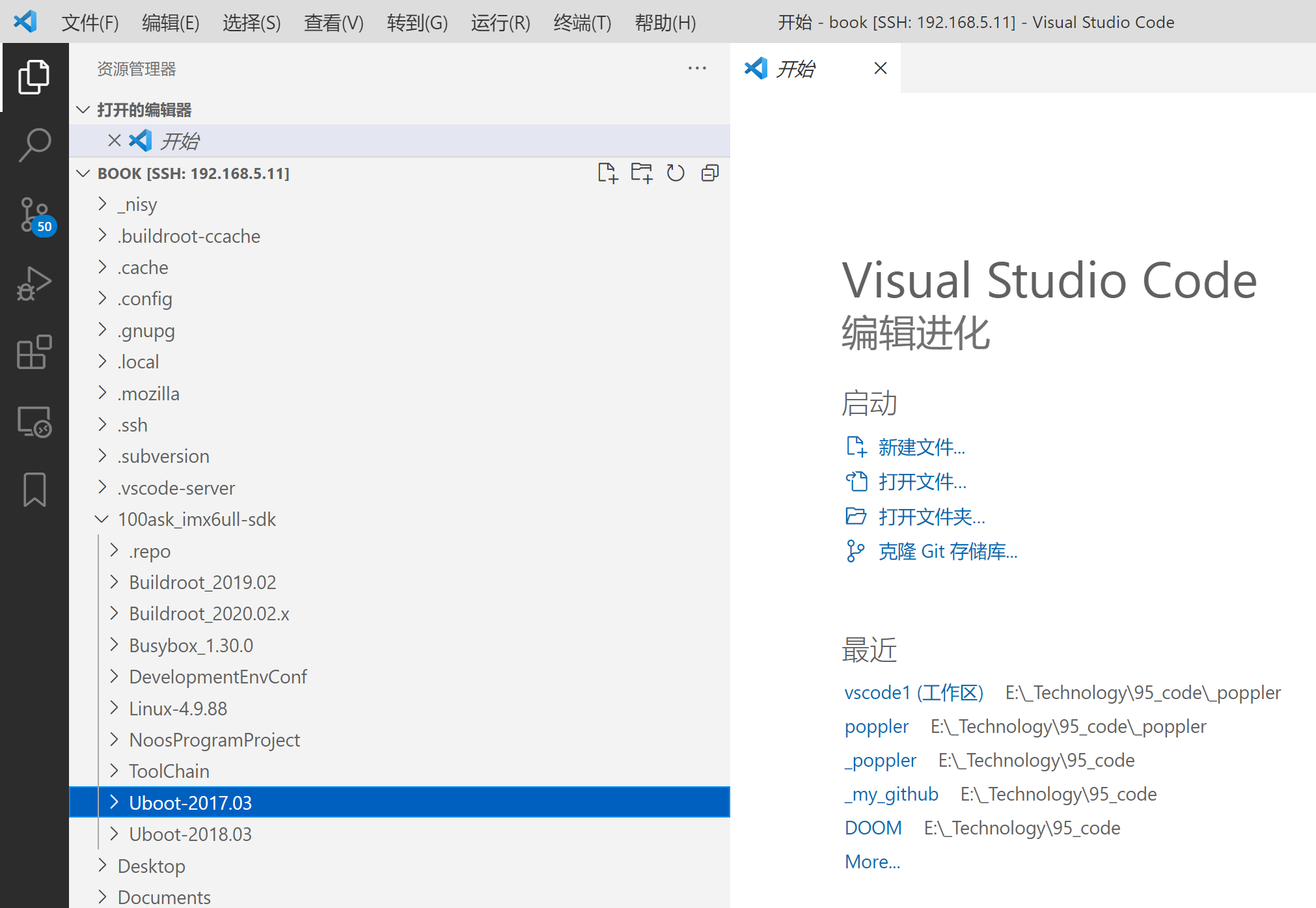 " width="40%">
" width="40%">
//开发板配置: ifconfig eth0 192.168.5.9 为了避免每次开机配置,可以: 设置 IP 为固定静态 IP(开机不变) 设置 eth0 为静态 IP 地址, 开发板/etc/network/目录下对 interfaces 文件进行修改 。 [root@100ask:~]# vi /etc/network/interfaces 修改并为如下内容,执行 :wq 保存并退出,执行/etc/init.d/S40network restart 重启网络服务。
auto lo
iface lo inet loopback
auto eth0
iface eth0 inet static
address 192.168.5.9
netmask 255.255.255.0
gateway 192.168.5.1
《4.4.1 文件系统内使用 nfs 挂载 ubuntu 目录》
[root@100ask:~]# mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt
在windows +虚拟机环境下开发(参考《第四 B 章 使用路由器配置网络》)
1.windows PC的wifi和路由器连接,比如获得IP是192.168.3.240.虚拟机使用“桥接模式-直接连接物理网络”,比如获得IP是192.168.3.10 2.开发板启动wifi,可以直接执行如下start_wifi.sh的shell脚本:
#!/bin/bash #启用 wlan0 无线网络设备 ifconfig wlan0 up #扫描周围网络设备 #iw dev wlan0 scan |grep SSID #配置网络连接参数 rm -rf /etc/wpa_supplicant.conf wpa_passphrase weiba1985 19560206 >> /etc/wpa_supplicant.conf #连接 wifi 设备 wpa_supplicant -B -iwlan0 -c /etc/wpa_supplicant.conf #查看连接状态 iw wlan0 link #为 wlan0 获取 ip 地址,确认与PC可以相互ping通 udhcpc -i wlan0 #查看所有网络设备 ifconfig -a
比如获得路由器分配的IP是192.168.3.6 3.用mobaxterm可以分别ssh连接到虚拟机和开发板的终端,在开发板的终端把虚拟机的文件系统加入mnt: mount -t nfs -o nolock,vers=3 192.168.3.10:/home/book/nfs_rootfs /mnt
代码编译
代码下载
执行以下4条命令,为方便大家复制,第3条是很长的命令,使用了,需要一并拷贝:
book@100ask:~ git clone https://e.coding.net/codebug8/repo.git book@100ask:~$ mkdir -p 100ask_imx6ull-sdk && cd 100ask_imx6ull-sdk book@100ask:~/100ask_imx6ull-sdk$ ../repo/repo init -u \ https://gitee.com/weidongshan/manifests.git -b \ linux-sdk -m imx6ull/100ask_imx6ull_linux4.9.88_release.xml --no-repo-verify book@100ask:~/100ask_imx6ull-sdk$ ../repo/repo sync -j4
在 ~/.bashrc 的行尾添加如下:
export ARCH=arm export CROSS_COMPILE=arm-buildroot-linux-gnueabihf- export PATH=$PATH:/home/book/100ask_imx6ull-sdk/ToolChain/arm-buildroot-linux-gnueabihf_sdk-buildroot/bin
设置完毕后,要执行 source ~/.bashrc 命令使其生效,
应用程序的编译和执行
我们要想给 ARM 板编译出 hello 程序,需要使用交叉编译工具链,比如:
$ arm-buildroot-linux-gnueabihf-gcc -o hello hello.c
这样编译出来的 hello 程序才可以在 ARM 板子上运行。 先把编译生成的 hello 文件拷贝到 Ubuntu nfs 服务目录下,备用:
$ cp hello /home/book/nfs_rootfs
调试开发板方法1:使用nfs方式
这种方式一般不自己从头开始编译busybox,只用于调试uboot+linux kernel+dts,文件系统即busybox不需要调整的场景。 #### uboot
u-boot的编译过程如下(编译uboot前必须先配置好工具链等开发环境): book@100ask: ~/100ask_imx6ull-sdk$ cd Uboot-2017.03 book@100ask: ~/100ask_imx6ull-sdk/Uboot-2017.03$ make distclean book@100ask: ~/100ask_imx6ull-sdk/Uboot-2017.03$ make mx6ull_14x14_evk_defconfig book@100ask: ~/100ask_imx6ull-sdk/Uboot-2017.03$ make
编译后检查是否生效,需要看看开机时间戳是否改变了,如下:
U-Boot 2017.03 (Oct 29 2022 - 21:06:24 -0400)
LINUX内核+dts
为了防止编译没有生效,除了留意打印的编译时间戳,还可以修改一些标记处,烧入单板时检查标记是否生效了,比如kernel顶层Makefile的:
VERSION = 4 PATCHLEVEL = 9 SUBLEVEL = 88 EXTRAVERSION = 20221029_by_nishengyue <------ 增加标记
烧入单板后应该有类似的打印,说明编译真正生效了:
[ 0.000000] Booting Linux on physical CPU 0x0 [ 0.000000] Linux version 4.9.8820221029_by_nishengyue (book@100ask) (gcc version 7.5.0 (Buildroot 2020.02-gee85cab) ) #1 SMP PREEMPT Sun Oct 30 11:46:38 CST 2022
在 ~/100ask_imx6ull-sdk/Linux-4.9.88 路径下,kernel的编译过程如下(编译内核前需要先配置好工具链等一些环境变量):
make mrproper make 100ask_imx6ull_defconfig make zImage -j4 make dtbs V=1 cp arch/arm/boot/zImage ~/nfs_rootfs cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs
如果出现 multiple definition of `yylloc` 报错,请参考该链接解决:https://blog.csdn.net/qq_36393978/article/details/117695708
这样在nfs_rootfs 能看到zImage和100ask_imx6ull-14x14.dtb 文件。
编译内核MODULE
book@b ook-virtual-machine:~$ cd ~/100ask_imx6ull-sdk/Linux-4.9.88/ book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make ARCH=arm CROSS_COMPILE=arm-buildroot-linux- gnueabihf- modules
安装内核module执行以下命令:
book@book-virtual-machine:~$ cd ~/100ask_imx6ull-sdk/Linux-4.9.88/ book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ sudo make ARCH=arm INSTALL_MOD_PATH=/home/book/nfs_rootfs/ modules_install
这样在 nfs_rootfs 能看到 lib 文件夹。
安装编译的内核+设备树+module
执行命令拷贝:
cp /mnt/zImage /boot cp /mnt/*.dtb /boot cp /mnt/lib/modules /lib -rfd
uboot从nfs网络启动
1.编译的结果拷贝到nfs目录下:
book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cp zImage ~/nfs_rootfs/ book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cp 100ask_imx6ull-14x14.dtb ~/nfs_rootfs/ book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cp -rf rootfs.tar.bz2 ~/nfs_rootfs/ book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images$ cd ~/nfs_rootfs book@100ask:~/nfs_rootfs$ sudo tar xjf rootfs.tar.bz2
2.ubuntu开启tftp: 在 Ubuntu 中执行以下命令安装 TFTP 服务:
sudo apt-get install tftp-hpa tftpd-hpa
然后,创建 TFTP 服务器工作目录,并打开 TFTP 服务配置文件,如下:
sudo vim /etc/default/tftpd-hpa
在配置文件/etc/default/tftpd-hpa 中,添加以下字段:
TFTP_DIRECTORY="/home/book/nfs_rootfs" TFTP_OPTIONS="-l -c -s"
最后,重启 TFTP 服务:
sudo service tftpd-hpa restart
查看 tftp 服务是否在运行,运行如下命令,即可查看是否在后台运行。
ps -aux | grep "tftp"
3.ubooot阶段启动停住后,输入如下:
=> setenv serverip 192.168.5.11 //设置服务器的 IP 地址,这里指的是 Ubuntu 主机 IP => setenv ipaddr 192.168.5.9 //设置开发板的 IP 地址。 => ping 192.168.5.11 //检查是否能ping通 => setenv nfsroot /home/book/nfs_rootfs //设置 nfs 文件系统所在目录。 => run netboot //设置完成后,运行网络启动系统命令
调试开发板方法2:使用编译buildroot套件并烧录进单板
这种方式一般可以一次性编译uboot+linux kernel+dts+文件系统busybox,操作简单长,但是如果全编译时间长。
buildroot套件的全编译
下面以100ask_imx6ull_pro_ddr512m_systemV_qt5_defconfig配置文件为例,在ubuntu终端上说明 Buildroot 的配置过程,在 ~/100ask_imx6ull-sdk/Buildroot_2020.02.x 路径下:
make clean make 100ask_imx6ull_pro_ddr512m_systemV_qt5_defconfig make all
注:其中buildroot支持的配置如下:
book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make list-defconfigs Built-in configs: 100ask_imx6ull_mini_ddr512m_systemV_core_defconfig - Build for 100ask_imx6ull_mini_ddr512m_systemV_core 100ask_imx6ull_mini_ddr512m_systemV_qt5_defconfig - Build for 100ask_imx6ull_mini_ddr512m_systemV_qt5 100ask_imx6ull_pro_ddr512m_systemV_core_defconfig - Build for 100ask_imx6ull_pro_ddr512m_systemV_core 100ask_imx6ull_pro_ddr512m_systemV_qt5_defconfig - Build for 100ask_imx6ull_pro_ddr512m_systemV_qt5 100ask_stm32mp157_pro_ddr512m_busybox_core_defconfig - Build for 100ask_stm32mp157_pro_ddr512m_busybox_core .... qemu_aarch64_virt_defconfig - Build for qemu_aarch64_virt qemu_arm_versatile_defconfig - Build for qemu_arm_versatile qemu_arm_versatile_nommu_defconfig - Build for qemu_arm_versatile_nommu qemu_arm_vexpress_defconfig - Build for qemu_arm_vexpress qemu_arm_vexpress_tz_defconfig - Build for qemu_arm_vexpress_tz ...... raspberrypi0_defconfig - Build for raspberrypi0 raspberrypi0w_defconfig - Build for raspberrypi0w raspberrypi2_defconfig - Build for raspberrypi2 raspberrypi3_64_defconfig - Build for raspberrypi3_64 raspberrypi3_defconfig - Build for raspberrypi3 raspberrypi3_qt5we_defconfig - Build for raspberrypi3_qt5we raspberrypi4_64_defconfig - Build for raspberrypi4_64 raspberrypi4_defconfig - Build for raspberrypi4 raspberrypi_defconfig - Build for raspberrypi .......
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make menuconfig
buildroot 下单独编译 u-boot
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make uboot-rebuild
buildroot 下单独编译内核+dts
在 book@100ask:~/100ask_imx6ull-sdk/Buildroot_2020.02.x/dl/linux/git 路径下
find . -iname *.o|xargs rm -rf *.o make mrproper make 100ask_imx6ull_defconfig make zImage -j4 make dtbs cp arch/arm/boot/zImage /home/book/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images/ cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb /home/book/100ask_imx6ull-sdk/Buildroot_2020.02.x/output/images/
//nisy:这个zImage是真正重编译的,但是buildroot的sdcard.img 的kernel没有重新编译,如何解决?
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make linux-rebuild //存疑,似乎仅仅是重新打包了zImage
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make linux-menuconfig
buildroot 下单独编译某个软件包
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make <pkg>-rebuild
buildroot 下进入 busybox 配置界面
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make busybox-menuconfig
buildroot 下生成系统 sdk,最后生成的目录在 output/images/目录下
book@100ask: ~/100ask_imx6ull-sdk/Buildroot_2020.02.x$ make sdk
buildroot 下检查文件系统是否真正重编译
可以在这个文件中做标记:
vi /home/book/100ask_imx6ull-sdk/Buildroot_2020.02.x/board/100ask/nxp-imx6ull/rootfs-overlay/systemV/etc/issue
烧入单板后,检查登陆后,是否有自己标记的字符串。